Simulation Results
Simulation in RLBench
CoRL-Bench task suite used for evaluation.
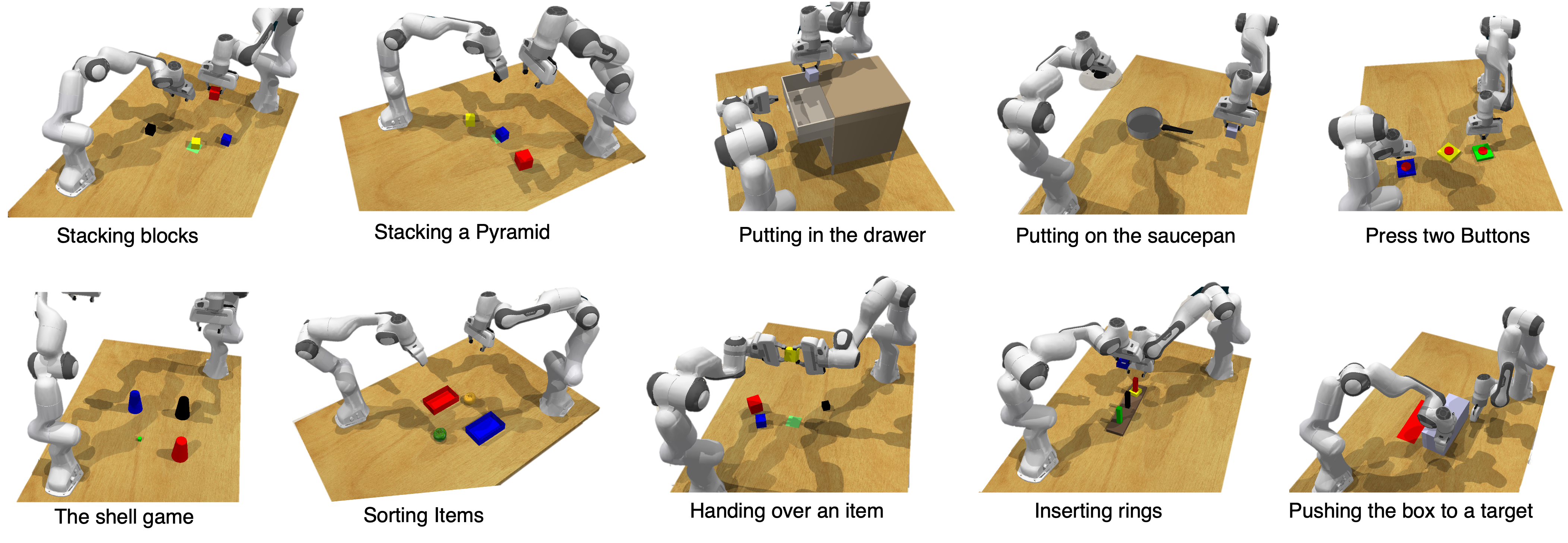
Successful Task Execution Examples
Stacking blocks
Stacking a pyramid
Putting in the drawer
Putting on the saucepan
Pushing buttons
The shell game
Sorting items
Handing over an item
Inserting rings
Pushing a box to a target
Stacking blocks
Stacking a pyramid
Quantitative Results
Task Success (TS↑), #Subtasks (↑), Subtask Success (STS↑)
| Model | Sequential Coordination | Coupled Interaction | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Stacking blocks | Stacking a pyramid | Putting on the saucepan | Pushing the box to a target | Putting in the drawer | |||||||||||
| TS | #ST | STS | TS | #ST | STS | TS | #ST | STS | TS | #ST | STS | TS | #ST | STS | |
| Centralized Planner (Oracle) | 0.80 | 10.9 | 1.00 | 0.60 | 11.0 | 0.90 | 0.80 | 8.0 | 0.93 | 1.00 | 16.0 | 1.00 | 1.00 | 10.0 | 1.00 |
| VoxPoser | 0.00 | 10.0 | 0.68 | 0.00 | 11.8 | 0.36 | 0.50 | 7.0 | 0.79 | 0.00 | 11.2 | 0.76 | 0.00 | 9.0 | 0.55 |
| PRISM (Ours) | 0.80 | 11.0 | 0.94 | 0.60 | 11.0 | 0.83 | 0.70 | 8.0 | 0.81 | 0.70 | 14.0 | 0.72 | 0.50 | 8.0 | 0.82 |
| Model | Parallel Coordination | Behavior-Aware Reasoning | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sorting items | Pushing buttons | Inserting rings | The shell game | Handing over an item | |||||||||||
| TS | #ST | STS | TS | #ST | STS | TS | #ST | STS | TS | #ST | STS | TS | #ST | STS | |
| Centralized Planner (Oracle) | 0.90 | 10.0 | 0.99 | 1.00 | 8.0 | 1.00 | 1.00 | 8.0 | 1.00 | 0.90 | 9.4 | 0.98 | 1.00 | 12.0 | 1.00 |
| VoxPoser | 0.40 | 10.2 | 0.74 | 0.30 | 8.0 | 0.40 | 0.00 | 12.8 | 0.13 | 0.00 | 14.5 | 0.58 | 0.00 | 10.0 | 0.46 |
| PRISM (Ours) | 0.90 | 10.0 | 0.98 | 1.00 | 8.0 | 1.00 | 0.60 | 15.0 | 0.95 | 0.70 | 13.0 | 0.96 | 0.70 | 12.0 | 0.91 |